
第一章 单元测试
1、单选题:
从自动控制原理的观点看,家用电冰箱工作时,房间的室温为( )。
选项:
A:给定量(或参考输入量)
B:干扰量
C:反馈量
D:输出量(或被控制量)
答案: 【干扰量】
2、单选题:
从自动控制原理的观点看,下列哪一种系统为开环控制系统?( )
选项:
A:国内现有的无人操作交通红绿灯自动控制系统
B:家用电热水器恒温控制系统
C:家用电冰箱温度控制系统
D:家用空调机温度控制系统
答案: 【国内现有的无人操作交通红绿灯自动控制系统】
3、单选题:
试判断下列元件的动态方程中的哪个是线性方程?( )
选项:
A:
B:
C:
D:
答案: 【
】
4、单选题:
自动控制系统的正常工作受到很多条件的影响,保证自动控制系统正常工作的先决条件是( )。
选项:
A:调节性
B:快速性
C:稳定性
D:反馈性
答案: 【稳定性】
5、单选题:
下列有关自动控制的相关描述正确的是( )。
选项:
A:只要引入反馈控制,就一定可以实现稳定的控制
B:反馈控制实质上是被控对象输出要求进行控制的过程
C:自动化装置包括变送器、传感器、调节器、执行器和被控对象
D:稳定的闭环控制系统总是使偏差趋于减小
答案: 【稳定的闭环控制系统总是使偏差趋于减小】
第二章 单元测试
1、单选题:
以温度为对象的恒温系统数学模型 ,其中θc为系统的给定,θf为干扰,则( )。
,其中θc为系统的给定,θf为干扰,则( )。
选项:
A:T为时间系数,K为调节系数
B:T为调节系数,K为放大系数
C:T为时间系数,K为放大系数
D:T为放大系数,K为调节系数
答案: 【T为时间系数,K为放大系数】
2、单选题:
被控对象的时间常数反映对象在阶跃信号激励下被控变量变化的快慢速度,即惯性的大小,时间常数大,则( )。
选项:
A:惯性大,被控变量速度慢,控制较平稳
B:惯性小,被控变量速度快,控制较平稳
C:惯性小,被控变量速度慢,控制较困难
D:惯性大,被控变量速度快,控制较困难
答案: 【惯性大,被控变量速度慢,控制较平稳】
3、单选题:
关于系统的传递函数,正确的描述是( )。
选项:
A:取决于系统的固有参数和系统结构,是单位冲激下的系统输出的拉氏变换
B:系统固有的参数,反映非零初始条件下的动态特征
C:输入量的形式和系统结构均是复变量s的函数
D:输入量与输出量之间的关系与系统自身结构无关
答案: 【取决于系统的固有参数和系统结构,是单位冲激下的系统输出的拉氏变换】
4、单选题:
一阶控制系统 在阶跃A作用下,L的变化规律为( )。
在阶跃A作用下,L的变化规律为( )。
选项:
A:
B:
C:
D: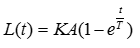
答案: 【
】
5、单选题:
一阶被控对象的特性参数主要有( )。
选项:
A:动态参数和容量参数
B:比例系数和变化速度
C:静态参数和衰减速度
D:放大系数和时间常数
答案: 【放大系数和时间常数】
6、单选题:
一阶系统传递函数为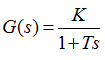 单位阶跃输入,要增大输出上升率,应( )。
单位阶跃输入,要增大输出上升率,应( )。
选项:
A:增大K
B:增大T
C:同时减小K和T
D:同时增大K和T
答案: 【同时减小K和T】
第三章 单元测试
1、单选题:
设积分环节和理想微分环节的微分方程分别为 和
和 ,则其传递函数分别为( )。
,则其传递函数分别为( )。
选项:
A:G(s)=1/s和G(s)=s
B:G(s)=1/s和G(s)=1/s
C:G(s)=s和G(s)=1/s
D:G(s)=s和G(s)=s
答案: 【】
2、单选题:
前馈控制系统是对干扰信号进行补偿的系统,是( )。
选项:
A:能消除不可测量的扰动系统
B:闭环控制系统和开环控制系统的复合
C:能抑制不可测量的扰动系统
D:开环控制系统
答案: 【】
3、单选题:
下列哪种调节器属于刚性反馈( )
选项:
A:积分调节器
B:微分调节器
C:比例积分调节器
D:比例调节器
答案: 【
4、单选题:
下列哪种调节器不单独使用( )
选项:
A:积分调节器
B:比例调节器
C:微分调节器
D:比例积分调节器
答案: 【】
5、单选题:
下列哪种调节器不能消除静态偏差( )
选项:
A:比例调节器
B:积分调节器
C:比例积分微分调节器
D:比例积分调节器
答案: 【】
第四章 单元测试
1、单选题:
关于调节阀的流量特性,下面描述错误的是( )
选项:
A:理想流量特性是指调节阀在前后压差固定的情况下得到的流量特性
B:调节阀的理想流量特性与实际流量特性存在区别
C:阀门的理想流量特性是由阀芯形状决定的
D:调节阀的流量特性是指介质流过调节阀的流量与调节阀的开度之间的关系
答案: 【】
2、单选题:
调节阀可调流量的下限值范围是( )
选项:
A:最大流量的2%~4%
B:最大流量的0.01%~0.1%
C:最大流量的0.1%~0.2%
D:最大流量的0.1%~0.5%
答案: 【
3、单选题:
调节阀的泄漏量,正确描述是( )
选项:
A:最大流量的0.01%~0.1%
B:为最大流量的2%~4%
C:等于调节阀的最小流量
D:一般最大流量的0.1%~0.5%
答案: 【】
4、单选题:
关于调节阀的可调范围,下列描述正确的是:( )
选项:
A:通常理想可调范围R为30左右
B:调节阀的可调范围与阀门的阀权度无关
C:调节阀工作流量特性与理想流量特性的差别与可调范围无关
D:调节阀的实际可调范围比理想可调范围小
答案: 【
5、单选题:
关于调节阀的流通能力的定义,不正确的是( )
选项:
A:当阀门全开时,阀两端压力降为105Pa,流体密度为1000kg/m3时,每小时流经调节阀的介质体积流量
B:合理选取调节阀的尺寸,就应正确计算流通能力
C:调节阀的流通能力随着阀门两端压差变化而变化
D:调节流通能力过小,导致使处于全开位置也不能适应最大负荷的需要,使调节系统失调
答案: 【
第五章 单元测试
1、单选题:
对于单位阶跃输入,下列说法不正确的是( )。
选项:
A:I型系统位置误差系数为无穷大时,稳态误差为0
B:II型及以上系统与I型系统一样
C:只有0型系统具有稳态误差,其大小与系统的开环增益成正比
D:只有0型系统具有稳态误差,其大小与系统的开环增益成反比
答案: 【】
2、单选题:
关于单位反馈控制系统中的稳态误差,下列表示不正确的是( )。
选项:
A:稳态误差是系统调节过程中其输出信号与输入信号之间的误差
B:稳态误差在实际中可以测量,具有一定的物理意义
C:系统的结构和参数不同,输入信号的形式和大小差异,都会引起稳态误差的变化
D:稳态误差由系统开环传递函数和输入信号决定
答案: 【
3、单选题:
0型系统,I型系统,II型系统对应的静态位置误差系数分别为( )。
选项:
A:K,0,0
B:∞,K,0
C:K,∞,∞
D:0,∞,∞
答案: 【
4、单选题:
单位反馈系统的开环传递函数为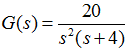 ,当参考输入
,当参考输入 时,稳态加速度误差系数为( )。
时,稳态加速度误差系数为( )。
选项:
A:Ka=∞
B:Ka=20
C:Ka=0
D:Ka=5
答案: 【
5、单选题:
由环节 组成的单位反馈系统(即负反馈传递函数为1的闭环系统)单位斜坡输入的稳态速度误差系数为( )。
组成的单位反馈系统(即负反馈传递函数为1的闭环系统)单位斜坡输入的稳态速度误差系数为( )。
选项:
A:0
B:K/200
C:K
D:1/K
答案:
第六章 单元测试
1、单选题:
设某闭环系统的总传递函数 ,此系统为( )。
,此系统为( )。
选项:
A:临界阻尼二阶系统
B:欠阻尼二阶系统
C:过阻尼二阶系统
D:等幅振荡二阶系统
答案: 【
2、单选题:
二阶环节 的阻尼比为( )。
的阻尼比为( )。
选项:
A:ξ=1.8
B:ξ=0.6
C:ξ=3.6
D:ξ=1.2
答案: 【
3、单选题:
设一传递函数为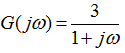 ,其对数幅值特性的增益穿越频率(即增益交接频率或增益为0分贝的频率)应为( )。
,其对数幅值特性的增益穿越频率(即增益交接频率或增益为0分贝的频率)应为( )。
选项:
A:
B:
C:
D:
答案: 【
】
4、单选题:
系统的稳定性与其传递函数的特征方程根的关系为( )。
选项:
A:各特征根全部具有正实部时,系统具有稳定性
B:各特征根至少有一个存在正实部时,系统具有稳定性
C:各特征根至少有一个存在零实部时,系统具有稳定性
D:各特征根实部均为负时,系统具有稳定性
答案:
5、单选题:
一个二阶环节采用局部反馈进行系统校正( )。
选项:
A:能增加系统的无阻尼自然频率
B:能增大频率响应的带宽
C:能提高系统的稳态精度
D:能增加瞬态响应的阻尼比
答案:
第七章 单元测试
1、单选题:
关于采样频率和信号失真度关系,下面描述不正确的是:( )
选项:
A:当ωs>2ωmax时,采样信号的频谱中保留原信号的频谱,只要做一个带宽为ωs/2的低通滤波器就可以获得原连续的频谱,从而恢复原信号
B:采样频率越低,采样次数越少,则信号失真度越大
C:采样周期越大,即ωs越高,信号失真度越小,控制效果越好
D:若ωs<2ωmax,则由采样信号的频谱不能获得不失真的原连续信号的频谱,也就不能获得不失真的原连续信号
答案: 【】
2、单选题:
关于零阶保持器,描述不正确的是( )
选项:
A:零阶保持器使系统总的相角滞后减小,对系统的稳定性不利
B:输出为一个高度为1,宽度为T的矩形波 gh(t)=1(t)-1(t-T)
C:零阶保持器是一种近似的带通滤波器。相角滞后零阶保持器的幅相特性中相角滞后随ω增加而加大时间滞后
D:由于保持器处在每个采样区间内的信号值为常数,其对时间的导数为0
答案: 【
3、单选题:
关于拉普拉斯变换和Z变换,下列不正确的是:( )
选项:
A:拉普拉斯变换和Z变换都是针对单输入和单输出系统。
B:拉普拉斯变换具有线性性质而Z变换不具有线性性质
C:传递函数分别为G1(z)和G2(z)的两个环节串联均等于两者乘积
D:拉普拉斯变换是针对微分方程,Z变换是针对差分方程
答案: 【】
4、单选题:
理想PID计算机控制过程算式不包括:( )
选项:
A:位移式
B:增量式
C:位置式
D:速度式
答案: 【
5、单选题:
关于PID计算机控制的位置式和速度式,下面描述不正确的是:( )
选项:
A:在以晶闸管作为执行器或在控制精度要求高的系统中,可采用位置式算法
B:以步进电动机或电动阀门作为执行器的系统中,则多选用位置式算法
C:速度式控制其执行器必须具有积分特性(如电动阀)
D:增量式算法存在积分截断效应较位置式大,有静态误差;溢出的影响大
答案: 【




评论0