
第一章 单元测试
1、单选题:
数字控制系统的实时性与( )有关。
选项:
A:其它选项都有
B:A/D
C:计算机速度
D:控制算法
答案: 【其它选项都有】
2、单选题:
计算机只承担数据的采集和处理工作,而不直接参与控制的系统是( )。
选项:
A:集散控制系统
B:数据处理系统
C:直接数字控制系统
D:监督控制系统
答案: 【数据处理系统】
3、判断题:
直接数字控制系统包含多台计算机,能够实现多级控制。( )
选项:
A:对
B:错
答案: 【错】
4、判断题:
理想采样开关的闭合时间趋近于0。( )
选项:
A:错
B:对
答案: 【对】
5、判断题:
当采样频率小于信号最高频率2倍时会出现混频现象。( )
选项:
A:错
B:对
答案: 【对】
6、单选题:
工程上常用的信号重构方法是( )。
选项:
A:一阶保持器
B:香农重构法
C:零阶保持器
D:单位脉冲序列
答案: 【零阶保持器】
第二章 单元测试
1、多选题:
质量弹簧阻尼系统的数学模型为( )。
选项:
A:
B:
C:
D:
答案: 【
;
】
2、多选题:
系统辨识的三大要素是( )。
选项:
A:输入输出数据
B:采样周期
C:等价原则
D:模型类
答案: 【输入输出数据;
等价原则;
模型类】
3、多选题:
已知差分方程 ,设
,设 ,其单位速度输入下的对应时刻输出值正确的是( )。
,其单位速度输入下的对应时刻输出值正确的是( )。
选项:
A:
B:
C:
D:
答案: 【
;
】
4、单选题:
z变换性质中,能够反映时域信号与频域表达式之间关系的有( )。
选项:
A:线性性
B:超前定理
C:卷积定理
D:初值定理
答案: 【初值定理】
5、判断题:
z反变换能够得到采样点间的连续函数信息。( )
选项:
A:对
B:错
答案: 【错】
6、判断题:
若 ,
, ,则二者串联得到的系统z传递函数为
,则二者串联得到的系统z传递函数为 。( )
。( )
选项:
A:错
B:对
答案: 【错】
7、单选题:
已知系统如图所示: 系统的闭环误差传递函数为( )。
系统的闭环误差传递函数为( )。
选项:
A:
B:
C:
D:
答案: 【
】
8、单选题:
 的初值和终值是( )。
的初值和终值是( )。
选项:
A:0,∞
B:1,1
C:0,1
D:1,∞
答案: 【0,∞】
9、单选题:
系统 的单位速度误差为( )。
的单位速度误差为( )。
选项:
A:0
B:∞
C:1
D:2
答案: 【0】
10、判断题:
若线性离散系统的特征方程为 ,则系统是稳定的。( )
,则系统是稳定的。( )
选项:
A:对
B:错
答案: 【对】
第三章 单元测试
1、单选题:
若某控制器为 ,采用脉冲不变法求数字控制器为( )。
,采用脉冲不变法求数字控制器为( )。
选项:
A:
B:
C:
D:
答案: 【
】
2、单选题:
模拟化设计中,采样周期T应该选______一些,T越大,离散化的D(z)与连续控制器D(s)的差异越_______。( )
选项:
A:大,小
B:小,大
C:大,大
D:小,小
答案: 【】
3、判断题:
双线性变换法的变换关系为 。( )
。( )
选项:
A:错
B:对
答案: 【】
4、判断题:
零极点匹配法设计 时,需按照
时,需按照 和增益相同确定增益系数k。( )
和增益相同确定增益系数k。( )
选项:
A:对
B:错
答案: 【】
5、单选题:
若某控制器为 ,T=0.1s,采用双线性变换法求数字控制器为( )。
,T=0.1s,采用双线性变换法求数字控制器为( )。
选项:
A:
B:
C:
D:
答案: 【
】
6、单选题:
PID控制器中积分项的作用是( )。
选项:
A:减小超调量
B:提高系统的快速性
C:减小稳态误差
D:消除稳态误差
答案: 【】
7、单选题:
PD控制器指( )控制器。
选项:
A:比例
B:比例反馈
C:比例积分
D:比例微分
答案: 【
8、判断题:
比例控制能够迅速反应误差,从而减小误差,最终消除误差。( )
选项:
A:对
B:错
答案: 【】
9、判断题:
保持器等效法变换后,D(z)的单位脉冲响应在采样点时刻与D(s)相同。( )
选项:
A:对
B:错
答案: 【】
10、判断题:
为了减小稳态误差,直流电机速度闭环控制应采用比例积分控制器。( )
选项:
A:对
B:错
答案: 【】
第四章 单元测试
1、多选题:
有限拍系统设计对系统闭环传递函数的约束是( )。
选项:
A:物理可实现性
B:快速性
C:准确性
D:稳定性
答案: 【】
2、多选题:
对于I型被控对象,_____输入下,有限拍无波纹系统控制器经有限拍输出为_______。( )
选项:
A:速度输入,恒速变化
B:阶跃,常数
C:阶跃,0
D:速度,常数
答案: 【】
3、判断题:
根据准确性要求,系统闭环传递函数He(z)要包含被控对象的不稳定极点。( )
选项:
A:对
B:错
答案: 【】
4、判断题:
大林算法存在振铃现象的原因是包含了负半实轴的极点。( )
选项:
A:错
B:对
答案: 【】
5、判断题:
系统ω变换后会产生附加零点,因此,伯德图幅频特性曲线的高频段是下降的。( )
选项:
A:对
B:错
答案: 【】
6、单选题:
若被控对象传递函数为 ,则广义对象为
,则广义对象为 为( )。
为( )。
选项:
A:
B:
C:
D:
答案: 【
】
7、单选题:
若被控对象传递函数为 ,针对单位阶跃输入设计有限拍控制系统,则系统闭环误差传递函数
,针对单位阶跃输入设计有限拍控制系统,则系统闭环误差传递函数 为( )。
为( )。
选项:
A:
B:
C:
D:
答案: 【
】
8、单选题:
若被控对象传递函数为,针对单位阶跃输入设计无波纹控制系统,则系统闭环传递函数 为( )。
为( )。
选项:
A:
B:
C:
D:
答案: 【
】
9、单选题:
若系统如图所示:
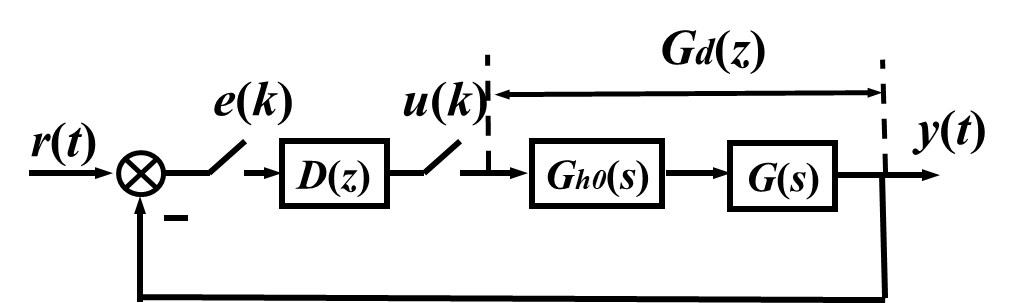
其中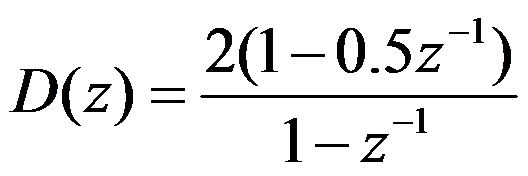 ,
,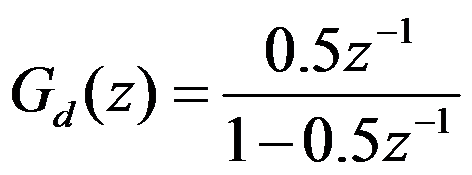 ,单位阶跃输入下控制器输出
,单位阶跃输入下控制器输出 为( )。
为( )。
选项:
A:
B:
C:
D:
答案: 【
】
10、单选题:
若有限拍系统在单位速度输入下,误差信号为 ,则系统输出( )拍跟上输入。
,则系统输出( )拍跟上输入。
选项:
A:2
B:3
C:4
D:1
答案: 【】
第五章 单元测试
1、判断题:
系统的状态变量是指能够完全描述动态系统时域行为的所含变量个数最少的变量组。( )
选项:
A:错
B:对
答案: 【】
2、判断题:
跟踪系统的极点包括控制极点和观测器极点两部分,引入输入信号不影响系统极点。( )
选项:
A:对
B:错
答案: 【】
3、判断题:
设被控对象(A,B),设计调节系统预报观测器,则其特征方程为 。( )
。( )
选项:
A:错
B:对
答案: 【】
4、判断题:
调节系统针对常值干扰设计PI控制器,即对系统输出进行比例反馈、状态积分的控制算法。( )
选项:
A:错
B:对
答案: 【】
5、判断题:
已知离散系统 ,
, ,
, ,系统具有状态能控性。( )
,系统具有状态能控性。( )
选项:
A:对
B:错
答案: 【】
6、判断题:
已知离散系统 ,
, ,
, ,系统具有状态能观测性。( )
,系统具有状态能观测性。( )
选项:
A:错
B:对
答案: 【】
7、判断题:
已知离散系统,,,系统的特征方程为 。( )
。( )
选项:
A:错
B:对
答案: 【】
8、单选题:
已知离散系统的状态空间表达式为
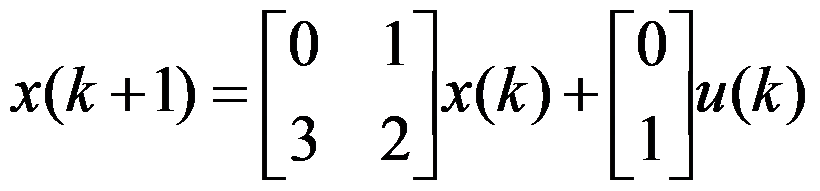
设初始状态为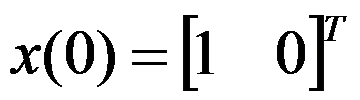 ,系统单位阶跃响应的第2拍
,系统单位阶跃响应的第2拍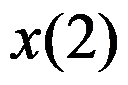 为( )。
为( )。
选项:
A: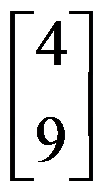
B:
C:
D:
答案: 【
】
9、判断题:
已知离散系统 ,
, ,若期望的闭环系统极点为
,若期望的闭环系统极点为 ,
, ,状态反馈闭环控制
,状态反馈闭环控制 ,则有
,则有 。( )
。( )
选项:
A:对
B:错
答案: 【】
10、判断题:
已知离散系统 ,
, ,
, ,若观测器极点配置在z平面坐标原点,预报观测器状态方程为
,若观测器极点配置在z平面坐标原点,预报观测器状态方程为 ,则
,则 。( )
。( )
选项:
A:错
B:对
答案: 【】
第六章 单元测试
1、判断题:
若计算机控制系统选用10位A/D转换器,则系统的量化误差为 。( )
。( )
选项:
A:错
B:对
答案: 【】
2、单选题:
设数字控制器 ,采用直接式实现的方框图如图所示:
,采用直接式实现的方框图如图所示:
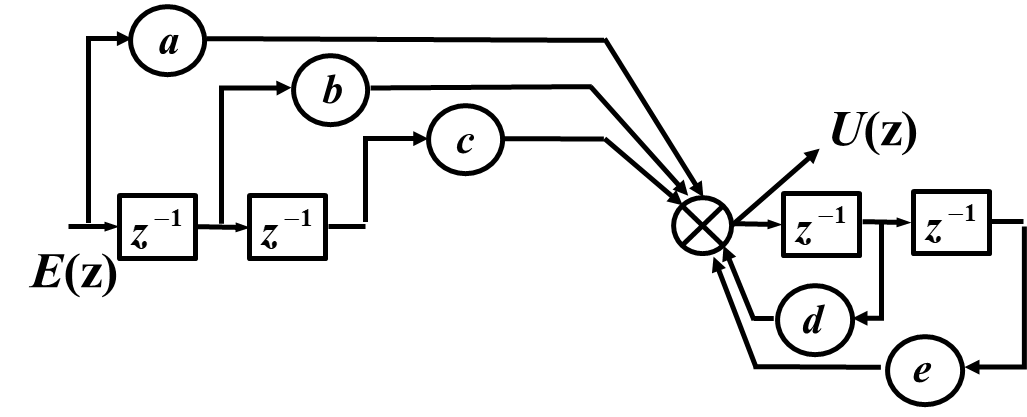
图中d为( )。
选项:
A:1
B:-0.25
C:-0.5
D:0.5
答案: 【】
3、多选题:
设数字控制器 ,采用正则形式I实现时,其差分方程为( )。
,采用正则形式I实现时,其差分方程为( )。
选项:
A:
B:
C:
D:
答案: 【
】
4、单选题:
设数字控制器,采用串联式正则形式I实现时,加减次数和移位次数分别为( )。
选项:
A:2,2
B:4,4
C:4,3
D:4,2
答案: 【】
5、单选题:
在数字控制器实现的运算结构中,量化误差产生的输出噪声最小的是( )。
选项:
A:并联型
B:嵌套式
C:直接型
D:串联型
答案: 【
6、判断题:
卡尔曼滤波是一种时域递推算法,根据上一状态的估计值和当前状态的观测值推出当前状态,是一种线性滤波器。( )
选项:
A:错
B:对
答案: 【】
7、判断题:
无迹卡尔曼滤波只适用于非线性程度不大的情况。( )
选项:
A:对
B:错
答案: 【】
8、判断题:
滑模面将系统的状态空间分为2部分。( )
选项:
A:错
B:对
答案: 【】
9、判断题:
通过选取适当的趋近律可以改善滑模变结构控制中的滑动模态运动段的品质。( )
选项:
A:对
B:错
答案: 【】
第七章 单元测试
1、判断题:
连接两个模块:移动鼠标到输出端,鼠标箭头会变成十字形光标,按住鼠标左键,拖动到另一个模块的输入端,完成连接。( )
选项:
A:对
B:错
答案: 【】
2、判断题:
假设要生成所选模型的Bode图,点击LINEARIZE 的“Bode” 。LTI Viewer便会将线性化模型linsys1添加到线性分析工作区中,并为该模型生成一个Bode图。( )
选项:
A:错
B:对
答案: 【】
3、判断题:
要在线性分析工具响应图上查看系统特性,如稳定裕度、超调量或稳定时间,可右键单击该图→Characteristics,然后选择想要查看的系统特性。( )
选项:
A:错
B:对
答案: 【】
4、单选题:
连线的分支:连好第一条线。选择支线的起点位置,先按下( )键,然后按鼠标,将连线拖到目标模块。
选项:
A:Alt
B:Shift
C:Ctrl
D:空格
答案: 【】
5、单选题:
SIMULink机电系统仿真中调整阶跃输入参数:从( )开始
选项:
A:0
B:2
C:3
D:1
答案: 【】




评论0